Санҷиши худкори андозагирии сахтии шӯрӣ HB-3000MS






Сохтори чаҳорчӯбаи портал метавонад сахтии қисмҳои калони корӣ (фармоишӣ)-ро санҷад.
Бо истифода аз системаи идоракунии рақамии махсус, системаи идоракунии электронии ҳалқаи пӯшида қувваи озмоиширо истифода мебарад. Қисми интиқоли тамоми мошин пурра аз муҳаррики зинапоя ва винти курадор иборат аст.
Сатҳи нокомии тамоми мошин паст аст, нигоҳдорӣ вақт ва меҳнатро сарфа мекунад ва равғани гидравликӣ талаб карда намешавад. Он ҳангоми истифода дар муҳитҳое, ки тафовути калони ҳарорат доранд, устувор ва боэътимод аст.
Истифода: Он барои санҷиши сахтии оҳани рехтагарӣ, пӯлод, металлҳои ғайриранга ва хӯлаҳои нарм, инчунин барои санҷиши сахтии баъзе маводҳои ғайриметаллӣ, ба монанди пластикҳои сахт ва бакелит мувофиқ аст.
Механизми боркунӣ:Технологияи боркунии сенсори идоракунии пурраи ҳалқаи пӯшида қабул карда шудааст, бе ягон хатои таъсири бор, басомади назорат 100 Гц ва дақиқии назорати дохилии тамоми раванд ба 0.5% мерасад; системаи боркунӣ мустақиман ба сенсори бор бидуни ягон сохтори мобайнӣ пайваст карда шудааст ва сенсори боркунӣ мустақиман бори сари фишори назоратро барои танзим чен мекунад, технологияи боркунии коаксиалӣ, сохтори фишанг надорад, аз соиш ва дигар омилҳо таъсир намегирад; системаи ғайримуқаррарии идоракунии ҳалқаи пӯшидаи системаи боркунии винти пешбар, подшипники дукаратаи бесоиш зарбаи зондро иҷро мекунад, қариб ки ба назар гирифтани пиршавӣ ва хатогиҳое, ки аз ҷониби ягон системаи винт ба вуҷуд омадаанд, лозим нест;
Механизми идоракунии барқӣ:қуттии идоракунии барқии баландсифат, ҷузъҳои электрикии бренди маъруф, системаи идоракунии серво ва ғайра.
Дастгоҳи муҳофизатии бехатарӣ:Ҳамаи зарбаҳо гузаришҳои маҳдудкунандаро барои таъмини кори таҷҳизот дар фосилаи бехатар қабул мекунанд; ба истиснои ҷузъҳои зарурии фошшуда, боқимонда сохтори пӯшидаро қабул мекунанд.
Амалиёт ва намоиш:идоракунии экрани сенсории компютерӣ, тарҳи эргономикӣ, зебо ва амалӣ.
Андозагирӣ ва хондани фосила:Системаи пурра автоматии андозагирии сахтии Бринелл.
Системаи идоракунӣ: назорати экрани сенсорӣ
Андозагирӣ: 4-650HBW
Қувваи озмоишӣ: 62.5, 187.5, 250, 500, 750, 1000, 1500, 3000кгф
Усули андозагирии фосила: андозагирии автоматии компютерӣ (ё андозагирии дастӣ)
Ченаки табдилдиҳӣ: HV, HK, HRA, HRBW, HRC, HRD, HREW, HRFW, HRGW, HRKW, HR15N, HR30N, HR45N, HR15TW, HR30TW, HR45TW, HS, HBS, HBW
Навъи муҳаррик: серво муҳаррик
Ҳолати интиқол: винти тӯбӣ
Вақти боркунӣ: 1-99 сония танзимшаванда
Масофаи байни ду сутун: 570 мм (мумкин аст мувофиқи дархост танзим карда шавад)
Баландии ҳадди аксари қисмати корӣ: 230 мм (мумкин аст мувофиқи дархост танзим карда шавад)
Масофаи ҳаракати мизи корӣ: 100 мм (ихтиёрӣ)
андоза: мошини асосӣ 750 * 450 * 1100 мм
Қувва: 220V, 50/60Hz
Вазни холис: тақрибан 300 кг
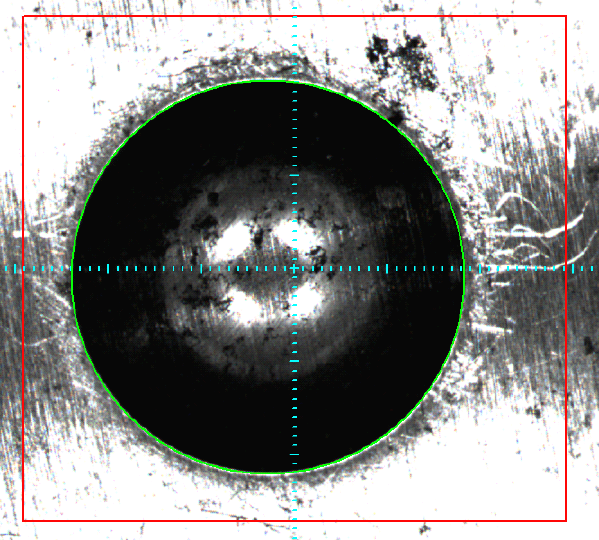
Ин система дорои функсияҳои андозагирии дастӣ ва пурра автоматӣ мебошад. Ин амалиётро хеле содда ва боэътимод мегардонад. Тавре ки дар зер нишон дода шудааст:
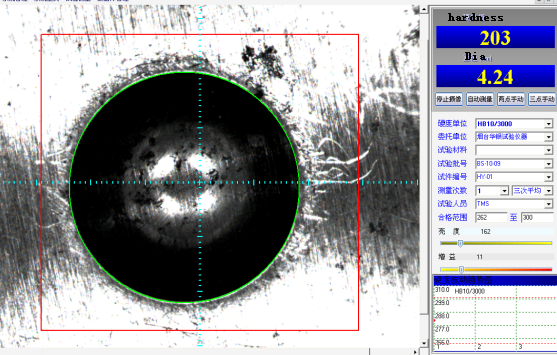
То он даме, ки чуқурча дар майдони экран бе ягон амалиёт пайдо шавад, диаметри чуқурча ва арзиши сахтӣ дар тарафи рости боло нишон дода мешаванд.
Истифодаи экрани сенсории LCD-и ҳамвор бо экрани калон. Барои интихоби барнома танҳо бо муш клик кунед; интерфейс равшан аст ва ягон хатои визуалӣ вуҷуд надорад, он метавонад вақти нигоҳдории тасвири фосила, қувваи санҷиш, линзаи объектив, интихоби фосила, андозагирии масофа, табдили арзиши сахтӣ ва маълумоти баромади гузоришро нишон диҳад.
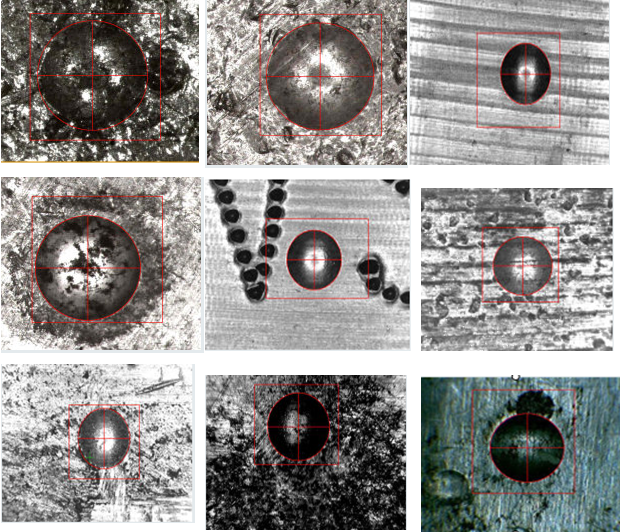
Система метавонад тасвирҳои изолятсияи Бринеллро дар заминаҳои мураккаб ба таври дақиқ фарқ кунад. Тасвирҳои зерин тасвирҳои андозагирии заминаҳои гуногуни мураккаб мебошанд.
Санҷиши сахтии дусутунии Бринелл, 1 маҷмӯъ
Φ2.5, Φ5мм, Φ10мм, 1 дона ҳар як
Маҷмӯи системаи автоматии андозагирӣ (аз ҷумла компютер, сенсори тасвири CCD, донгл, нармафзор, сими додаҳо)
2 дона блокҳои стандартии сахтии Бринелл












